DEEP SEA TECHNOLOGY
Submersibles
The Deep Sea Technologies group is involved indeveloping manned and unmanned underwater vehicles for the exploration and exploitation of deep ocean mineral resources such as poly-metallic manganese nodules, gas hydrates, hydrothermalsulphides,etc and other oceanographic, polar and industrial applications

Manned and unmanned underwater vehicles:
- Design and development of 6000 m depth rated scientific manned submersible with a capacity to carry three crew members and scientific equipment
- Development of 6000m depth rated work class deep water Unmanned Remotely Operable Vehicle (ROSUB 6000) and utilization for deep ocean scientific exploration
- Development of 500 m depth rated polar cum shallow water remotely operated vehicle (PROVe) and utilization for shallow water and polar scientific studies.
- To assess the slurry flow behavior and resultant accumulation in the vertical system at varying flow rates during pulsatile actuation.
- Development of deep water Wire-line Autonomous Coring System(WACS) to drill up to 100 m and collect long core samples from ocean basins up-to the maximum depth of 3000 m for Gas hydrates ground truth validation.
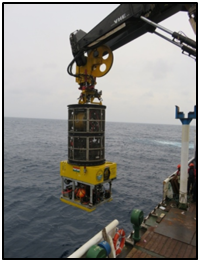
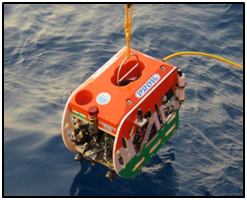
ROSUB 6000 system
View of ROSUB 6000 system operation
Deep water ROV - ROSUB 6000
Development of 6000 m depth rated deep-water work class Remotely Operated vehicles (ROV) by National Institute of Ocean Technology (NIOT)was initiated by Polymetallic Nodule Management (PMN) Board of the Ministry of Earth Sciences (MoES), Govt. of India. The system design, development and testing was completed for scientific usage. The ROV is equipped with multifunctional tools and sensors for offshore applications such as deep ocean mineral exploration, seabed imaging, gas hydrate exploration, pipeline routing, submarine cabling, well head detections, sampling etc.The ROSUB system was developed and tested up to a depth of 5289m water depth at PMN site for its envisaged functionality. The scientific explorations at Gas hydrates site in Krishna-Godavari (KG) basin, hydrothermal sulphides site - SONNE Field in South Central Indian Ridge region, Poly Metallic Nodule Mining (PMN) site in Central Indian Ocean Basin (CIOB) was conducted using deep water ROV (ROSUB 6000) up to a depth 5289m. ROSUB 6000 system was deployed and operated using imaging sonar and optical imaging at 3400m water depth for target verification of the missing Indian Air Force AN32 aircraft during September 2016.
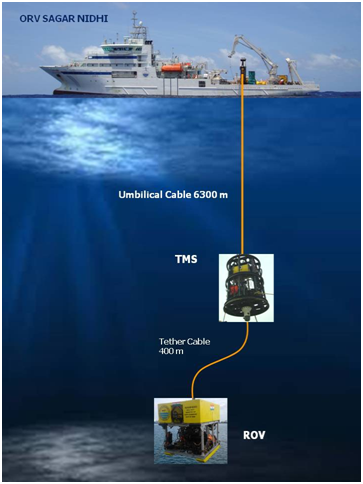
The ROSUB system consists of deep water work class Remotely Operable Vehicle (ROV), Tether Management System (TMS), Ship based Launching and Recovery system (LARS), Power transmission and Data telemetry system, Integrated Navigation System (INS) and Control software. The submerged weight is compensated by buoyancy packs made of syntactic foam fitted to the upper part of the frame. It is fitted with a five-function grabber arm, used to position the ROV steadily in one position by holding on to a support, and a seven-function manipulator is then used to perform assigned robotic tasks. The manipulator is similar to those found in various industrial applications on-shore, having a number of joints, a rotating wrist, and a hand-like claw.
Shallow water / Polar ROV (PROVe)
Based on the experience gained from 6000 m depth rated unmanned underwater vehicle (ROSUB 6000), design and development of Shallow water/ Polar ROV (PROVe) was taken up by NIOT by indigenous way to cater the requirement of scientific and engineering usages in shallow water and polar regions. The vehicle is electrically propelled using BLDC thrusters and can be maneuvered in 4-DOF (Degrees of Freedom) in Shallow waters up to 500m water depth. The vehicle is equipped with underwater video cameras, lights, scientific sensors (CTDO), underwater spectral irradiance meter, scanning sonar, navigation sensor and ice coring devices. The PROVe shallbe used for oceanographic investigation, search and recovery in port and harbors, biodiversity mapping, coral reef monitoring, ice thickness measurement,visual support etc. Scientific explorations were conducted using the PROVe at coral reef studies at Andaman Islands and biodiversity studies at Arabian Sea up to depth of 200m. Underwater inspection of objects was conducted using PROVe for DRDO purpose in Bay of Bengal up to a depth of 90m. The PROVe was tested and qualified for its polar scientific usage at Priyadarshini lake near Maitri base station of Antarctica and Indian Barrier Ice shelf during 34th Indian Antarctic Summer Expedition up to a depth 62m .
Underwater picture of PROVe
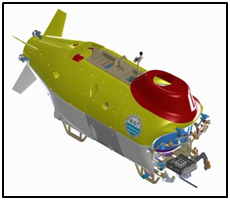
Conceptual design of Manned Submersibles
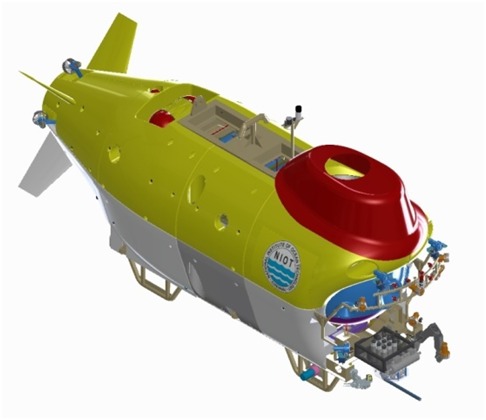
Deep water Manned Submersible
The DST group is involved in design and development of 6000 m depth rated scientific research manned submersible.Manned submersible allow the scientists to get down in the environment to observe the life in its natural habitat at deep-waters. The manned submersible shall have capability for deep ocean resource explorations, scientific observations in deep waters, search and rescue support activities. The vehicle has a capability to carry 3 persons with operation endurance of 12 hours at 6000 m depth and emergency endurance of 96 hours were finalised for the development of personnel sphere/human capsule, life support systems, ballast systems, propulsion systems, underwater battery, power distribution system, sensors, control hardware and navigation.
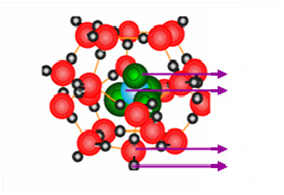
TECHNOLOGY FOR GAS HYDRATES:
The deep oceans have abundant mineral resources like Polymetallic nodules; cobalt rich manganese crust and hydrothermal deposits.Utilising this mineral wealth for the benefit of mankind will be the focus of ocean mining activities in future.Polymetallic nodules have economically valuable metals such as Copper, Cobalt, Nickel and Manganese and are viewed as potential resources for the depleting land resources and increasing demand.
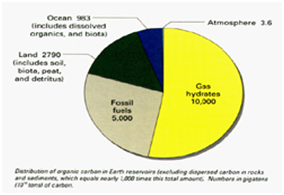
Carbon Distribution
Carbon Distribution
Following are the major activities
Deep sea exploration technology development
- ROSUB 6000 usage with scientific payloads for gas hydrate exploration
- Design and Development of Autonomous Coring System for ground truth validation of gas hydrate occurrence
Research activities on extraction methodology/technology
- Mathematical / theoretical studies
- Laboratory scale experiments
- Development of technology for conducting experiments for methane extraction from gas hydrates
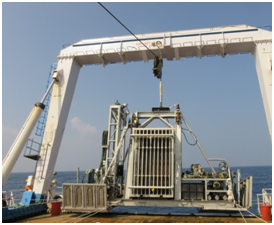
WACS Deployment
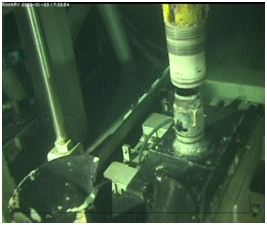
Underwater Drillhead

Magazine view
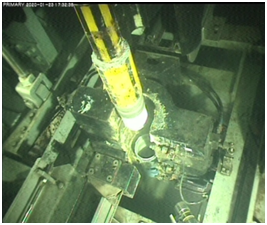
Underwater drlling view
Towards ground truth validation of gas hydrate occurrence, a wire-line autonomous coring system (WACS) is developed in association with Williamson & Associates, USA. The system is designed to drill up to 100 m and collect long core samples by wire-line drilling technology from ocean basins up-to the maximum depth of 3000 m. The system is integrated with pressure core sampler for the recovery of gas hydrates at in-situ pressure condition. The System is qualified for operation up to 2906 m water depth in Bay of Bengal. The WACS was deployed and drilled up to 101.5 mbsf at 223 m water depth and 60mbsf at gas hydrate site of Krishna Godavari basin in Bay of Bengal.
Towards exploration of gas hydrates, NIOT had developed ROV - ROSUB 6000 with necessary scientific payloads for methane hydrate exploration. Vehicle was deployed at gas hydrate site in KG basin and established the occurrence of chemosynthetic habitats at 1037 m water depth in Bay of Bengal.
Extraction feasibility studies
- Methane hydrate extractions feasibility studies were conducted using electro-thermal and depressurization based techniques with reference to the gas hydrate reservoirs such as Krishna Godavari, Mahanadi and Andaman Basins.
- Simulations were performed using MATLAB code and reservoir modelling software TOUGH + HYDRATE to identify the efficacy of the depressurization and electro-thermal techniques.
- To understand the formation mechanism, laboratory set up is also established for thermal conductivity and acoustic properties measurement at in-situ gas hydrate phase.